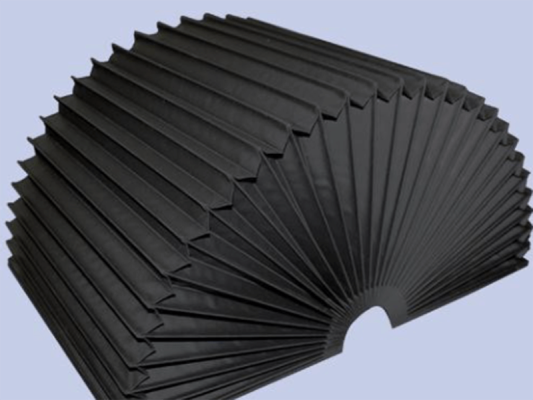
PVC/PU Bellows Cover Welding Machine
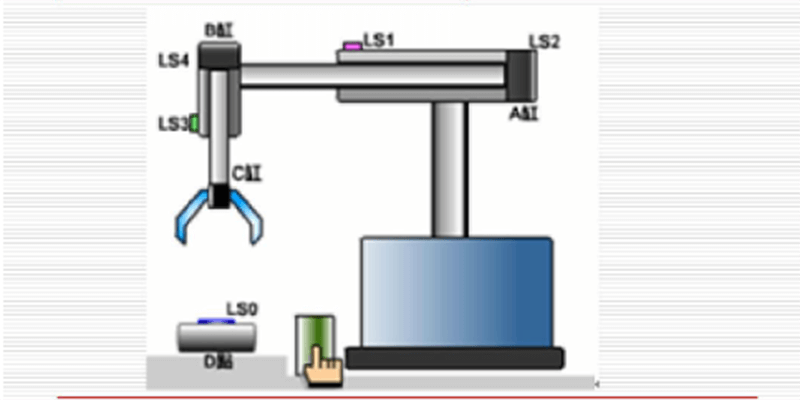
机械手是一种自动化设备,它模仿人手的动作能力,通过一系列的机械装置、传感器和控制系统实现工作任务。
机械手的工作原理主要依赖于其手部、运动机构和控制系统这三个基本组成部分。
1. 手部
手部是机械手直接与物体接触的部分,根据被抓持物件的形状、尺寸、重量、材料和作业要求设计,有多种结构形式,如夹持型、托持型和吸附型等。
2. 运动机构
运动机构包括使手部完成各种摆动、移动或复合运动的部件,实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式称为机械手的自由度。一般专用机械手有2~3个自由度。(自由度是机械手设计的关键参数,自由度越多,机械手的灵活性越大,通用性越广,其结构也越复杂。)
3. 控制系统
控制系统通过控制机械手每个自由度的电机来完成特定动作,同时接收传感器反馈的信息,形成稳定的闭环控制。
控制系统的核心通常是由单片机或DSP等微控制芯片构成,通过对其编程实现所需功能。
此外,驱动系统为机械手提供动力,可以通过电力、气压或液压来推动机械手臂和手爪的运动。
根据控制系统的指令和设定的工作任务执行工作。根据需要,机械手可以进行抓取、放置、装配、搬运等操作,完成各项任务。
并且,位置检测装置随时将执行机构的实际位置反馈给控制系统,并与设定的位置进行比较,然后通过控制系统进行调整,从而使执行机构以一定的精度达到设定位置。
整个过程中,机械手的运行是高度自动化的,能够准确地执行各项工作任务。它在工业生产、仓储物流等应用,能够提高生产效率、节省人力成本,提高工作安全性和精度。
© 2012‐2022 SHANGHAI PUXIONG, Inc. All rights reserved. ProPureX™
.jpg)
.jpg)